SPI, I2C, UART, I2S, GPIO, SDIO, CAN เพียงอ่านบทความนี้
รถบัสมักจะติดอยู่ในนั้นเสมอ สัญญาณในโลกนี้เหมือนกันหมด แต่มีรถเมล์หลายพันคันซึ่งเป็นเรื่องน่าปวดหัว โดยทั่วไปแล้วรถโดยสารมีสามประเภท ได้แก่ บัสภายในบัสระบบและบัสภายนอก บัสภายในคือบัสระหว่างชิปอุปกรณ์ต่อพ่วงในไมโครคอมพิวเตอร์และโปรเซสเซอร์ซึ่งใช้สำหรับการเชื่อมต่อโครงข่ายที่ระดับชิป ในขณะที่บัสระบบเป็นบัสระหว่างบอร์ดปลั๊กอินและแผงระบบในไมโครคอมพิวเตอร์และใช้สำหรับการแลกเปลี่ยนซึ่งกันและกันในระดับบอร์ดปลั๊กอิน บัสภายนอกคือบัสระหว่างไมโครคอมพิวเตอร์และอุปกรณ์ภายนอก ในฐานะอุปกรณ์ไมโครคอมพิวเตอร์จะแลกเปลี่ยนข้อมูลและข้อมูลกับอุปกรณ์อื่น ๆ ผ่านทางบัส ใช้สำหรับการเชื่อมต่อโครงข่ายระดับอุปกรณ์
นอกจากรถบัสแล้วยังมีอินเทอร์เฟซบางอย่างซึ่งเป็นชุดของรถประจำทางหลายสายหรือไม่ก็ไม่ได้ถูกปฏิเสธ
1. สพร
SPI (Serial Peripheral Interface): วิธีซิงโครนัสบัสอนุกรมที่เสนอโดย MOTOROLA พอร์ตอนุกรมซิงโครนัสความเร็วสูง สามารถซิงโครไนซ์อินเทอร์เฟซแบบ 3 ถึง 4 สายการส่งและรับแบบอิสระ
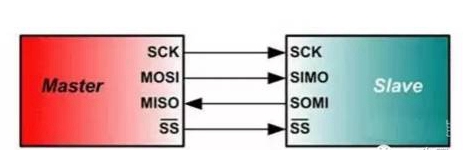
มีการใช้กันอย่างแพร่หลายเนื่องจากมีฟังก์ชั่นฮาร์ดแวร์ที่มีประสิทธิภาพ ในเครื่องมืออัจฉริยะและระบบการวัดและควบคุมประกอบด้วยไมโครคอมพิวเตอร์ชิปตัวเดียว หากความต้องการความเร็วไม่สูงโหมดบัส SPI เป็นทางเลือกที่ดี สามารถบันทึกพอร์ต I / O ปรับปรุงจำนวนอุปกรณ์ต่อพ่วงและประสิทธิภาพของระบบ บัส SPI มาตรฐานประกอบด้วยสี่บรรทัด: สายนาฬิกาแบบอนุกรม (SCK), สายอินพุตหลัก / สายเอาท์พุตหลัก (MISO) สายอินพุตเอาต์พุตหลัก / ทาส (MOSI) และสัญญาณเลือกชิป (CS) ชิปอินเทอร์เฟซ SPI บางตัวมีสายสัญญาณขัดจังหวะหรือไม่มี MOSI
บัส SPI ประกอบด้วยสายสัญญาณสามเส้น: นาฬิกาอนุกรม (SCLK), เอาต์พุตข้อมูลอนุกรม (SDO) และอินพุตข้อมูลอนุกรม (SDI) SPI บัสสามารถรับรู้การเชื่อมต่อโครงข่ายของอุปกรณ์ SPI หลายตัว อุปกรณ์ SPI ที่ให้นาฬิกาอนุกรม SPI คืออุปกรณ์หลัก SPI หรืออุปกรณ์หลัก (Master) และอุปกรณ์อื่น ๆ คือ SPI Slave หรืออุปกรณ์ Slave (Slave) การสื่อสารแบบฟูลดูเพล็กซ์สามารถรับรู้ได้ระหว่างอุปกรณ์หลักและอุปกรณ์ทาส เมื่อมีอุปกรณ์ทาสหลายเครื่องสามารถเพิ่มบรรทัดการเลือกอุปกรณ์ทาสได้ หากคุณใช้พอร์ต IO สากลเพื่อจำลองบัส SPI คุณต้องมีพอร์ตเอาต์พุต (SDO) พอร์ตอินพุต (SDI) และพอร์ตอื่น ๆ ขึ้นอยู่กับประเภทของอุปกรณ์ที่ใช้งาน หากคุณต้องการใช้อุปกรณ์ master-slave คุณต้องมีพอร์ตอินพุตและเอาต์พุต , หากรับรู้เฉพาะอุปกรณ์หลักเท่านั้นพอร์ตเอาต์พุตก็เพียงพอแล้ว หากรับรู้เฉพาะอุปกรณ์ทาสเท่านั้นจำเป็นต้องใช้พอร์ตอินพุตเท่านั้น
2. ไอทูซี
I2C (Inter-Integrated Circuit): บัสอนุกรมสองสายที่พัฒนาโดย PHILIPS ใช้เพื่อเชื่อมต่อไมโครคอนโทรลเลอร์และอุปกรณ์ต่อพ่วง
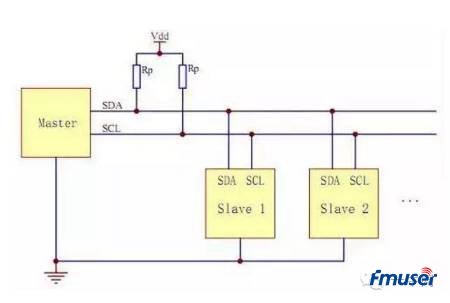
บัส I2C ใช้สายไฟสองเส้น (SDA และ SCL) เพื่อถ่ายโอนข้อมูลระหว่างบัสและอุปกรณ์การสื่อสารแบบอนุกรมระหว่างไมโครคอนโทรลเลอร์และอุปกรณ์ภายนอกหรือการถ่ายโอนข้อมูลแบบสองทางระหว่างอุปกรณ์หลักและอุปกรณ์ทาส I2C เป็นเอาต์พุต OD ส่วนใหญ่ของ I2C เป็นแบบ 2 สาย (นาฬิกาและข้อมูล) โดยทั่วไปใช้ในการส่งสัญญาณควบคุม
I2C เป็นบัสหลายต้นแบบดังนั้นอุปกรณ์ใด ๆ ก็สามารถทำงานได้เหมือนต้นแบบและควบคุมบัส อุปกรณ์แต่ละชิ้นบนรถบัสมีที่อยู่ที่ไม่ซ้ำกันและตามความสามารถของตนเองพวกเขาสามารถทำงานเป็นเครื่องส่งหรือเครื่องรับได้ ไมโครคอนโทรลเลอร์หลายตัวสามารถอยู่ร่วมกันบนบัส I2C เดียวกันได้
3. ยูอาร์ที
UART: พอร์ตอนุกรมแบบอะซิงโครนัสสากลการสื่อสารสองทางที่สมบูรณ์ตามอัตราการส่งข้อมูลมาตรฐานความเร็วช้า
บัส UART เป็นพอร์ตอนุกรมแบบอะซิงโครนัสดังนั้นโดยทั่วไปจึงมีความซับซ้อนมากกว่าพอร์ตอนุกรมซิงโครนัสสองพอร์ตแรก โดยทั่วไปจะประกอบด้วยเครื่องกำเนิดอัตรารับส่งข้อมูล (อัตรารับส่งข้อมูลที่สร้างขึ้นจะเท่ากับ 16 เท่าของอัตราการส่งข้อมูล) ตัวรับ UART และเครื่องส่งสัญญาณ UART ประกอบด้วยสายไฟสองเส้นในฮาร์ดแวร์สายหนึ่งสำหรับส่งและอีกสายสำหรับรับ
UART เป็นชิปที่ใช้ควบคุมคอมพิวเตอร์และอุปกรณ์อนุกรม สิ่งหนึ่งที่ควรทราบคือมีอินเทอร์เฟซอุปกรณ์ปลายทางข้อมูล RS-232C เพื่อให้คอมพิวเตอร์สามารถสื่อสารกับโมเด็มหรืออุปกรณ์อนุกรมอื่น ๆ ที่ใช้อินเทอร์เฟซ RS-232C ในฐานะที่เป็นส่วนหนึ่งของอินเทอร์เฟซ UART ยังมีฟังก์ชันต่อไปนี้:
ข้อมูลแบบขนานที่ส่งจากคอมพิวเตอร์จะถูกแปลงเป็นสตรีมข้อมูลอนุกรมเอาต์พุต แปลงข้อมูลอนุกรมจากภายนอกคอมพิวเตอร์เป็นไบต์สำหรับใช้โดยอุปกรณ์ที่ใช้ข้อมูลแบบขนานภายในคอมพิวเตอร์ เพิ่มพาริตีบิตให้กับสตรีมข้อมูลอนุกรมเอาต์พุตและดำเนินการตรวจสอบความเท่าเทียมกันบนสตรีมข้อมูลที่ได้รับจากภายนอก เพิ่มเครื่องหมายเริ่มหยุดในสตรีมข้อมูลเอาต์พุตและลบเครื่องหมายเริ่มหยุดออกจากสตรีมข้อมูลที่ได้รับ จัดการสัญญาณขัดจังหวะที่ส่งโดยแป้นพิมพ์หรือเมาส์ (แป้นพิมพ์และเมาส์เป็นอุปกรณ์อนุกรมด้วย) สามารถจัดการปัญหาการจัดการการซิงโครไนซ์ของคอมพิวเตอร์และอุปกรณ์อนุกรมภายนอก UART ระดับไฮเอนด์บางตัวยังมีบัฟเฟอร์สำหรับข้อมูลอินพุตและเอาต์พุต UART รุ่นใหม่คือ 16550 ซึ่งสามารถจัดเก็บข้อมูลได้ 16 ไบต์ในบัฟเฟอร์ก่อนที่คอมพิวเตอร์จะต้องประมวลผลข้อมูล UART ปกติคือ 8250 ตอนนี้ถ้าคุณซื้อโมเด็มในตัวมักจะมี 16550 UART อยู่ภายในโมเด็ม
3. การเปรียบเทียบ ของ SPI, I2C และ UART
วิธีการสื่อสารทั้ง SPI และ I2C เป็นการสื่อสารระยะสั้นระหว่างชิปและชิปหรือระหว่างส่วนประกอบอื่น ๆ เช่นเซ็นเซอร์และชิป SPI และ IIC เป็นการสื่อสารแบบบอร์ดต่อบอร์ดบางครั้ง IIC ยังทำการสื่อสารระหว่างบอร์ดถึงบอร์ด แต่ระยะทางสั้นมาก แต่มากกว่าหนึ่งเมตรเช่นหน้าจอสัมผัสบางส่วนหน้าจอ LCD ของโทรศัพท์มือถือฟิล์มบางจำนวนมาก สายเคเบิลใช้ IIC, I2C สามารถใช้แทนบัสขนานมาตรฐานวงจรรวมและโมดูลการทำงานต่างๆที่สามารถเชื่อมต่อได้ I2C เป็นบัสหลายต้นแบบดังนั้นอุปกรณ์ใด ๆ ก็สามารถทำงานได้เหมือนต้นแบบและควบคุมบัส อุปกรณ์แต่ละชิ้นบนรถบัสมีที่อยู่ที่ไม่ซ้ำกันและตามความสามารถของตนเองพวกเขาสามารถทำงานเป็นเครื่องส่งหรือเครื่องรับได้ ไมโครคอนโทรลเลอร์หลายตัวสามารถอยู่ร่วมกันบนบัส I2C เดียวกันได้ สองสายนี้เป็นของเกียร์ความเร็วต่ำ
UART ใช้ในการสื่อสารระหว่างอุปกรณ์สองเครื่องเช่นการสื่อสารระหว่างอุปกรณ์กับคอมพิวเตอร์ที่ทำด้วยไมโครคอมพิวเตอร์ชิปตัวเดียว การสื่อสารดังกล่าวสามารถทำได้ในระยะทางไกล ความเร็ว UART เร็วกว่าสองข้อข้างต้นถึง 100K ใช้ในการสื่อสารกับคอมพิวเตอร์และอุปกรณ์หรือระหว่างคอมพิวเตอร์และการคำนวณ แต่ช่วงที่มีประสิทธิภาพจะไม่ยาวมากประมาณ 10 เมตร ข้อดีของ UART คือมีการรองรับที่หลากหลายและโครงสร้างการออกแบบโปรแกรม ค่อนข้างง่ายด้วยการพัฒนาของ USB UART กำลังค่อยๆตกต่ำ
5. ไอทูเอส
I2S (Inter-IC Sound Bus) เป็นมาตรฐานบัสที่พัฒนาโดย Philips สำหรับการส่งข้อมูลเสียงระหว่างอุปกรณ์เสียงดิจิทัล ส่วนใหญ่เป็นแบบ 3 สาย (นอกเหนือจากนาฬิกาและข้อมูลแล้วยังมีสัญญาณเลือกช่องสัญญาณซ้ายและขวา) I2S ส่วนใหญ่ใช้ในการส่งสัญญาณเสียง เช่น STB, DVD, MP3 ฯลฯ ที่ใช้กันทั่วไป

ในมาตรฐาน I2S จะมีการระบุทั้งข้อมูลจำเพาะของอินเทอร์เฟซฮาร์ดแวร์และรูปแบบของข้อมูลเสียงดิจิทัล I2S มีสัญญาณหลัก 3 แบบ: 1) Serial clock SCLK หรือที่เรียกว่า bit clock (BCLK) ซึ่งสอดคล้องกับข้อมูลเสียงดิจิทัลแต่ละบิต SCLK มี 1 พัลส์ ความถี่ของ SCLK = 2 ×ความถี่การสุ่มตัวอย่าง×จำนวนบิตสุ่มตัวอย่าง 2) นาฬิกากรอบ LRCK (หรือที่เรียกว่า WS) ใช้เพื่อสลับข้อมูลของช่องสัญญาณซ้ายและขวา LRCK ของ "1" หมายความว่ากำลังส่งข้อมูลของช่องสัญญาณซ้ายและ "0" หมายความว่ากำลังส่งข้อมูลของช่องสัญญาณด้านขวา ความถี่ของ LRCK เท่ากับความถี่ในการสุ่มตัวอย่าง 3) ข้อมูลอนุกรม SDATA คือข้อมูลเสียงที่แสดงในส่วนประกอบสองส่วน บางครั้งเพื่อให้ซิงโครไนซ์ระบบได้ดีขึ้นจำเป็นต้องส่งสัญญาณ MCLK อื่นที่เรียกว่านาฬิกาหลักหรือที่เรียกว่านาฬิการะบบ (Sys Clock) ซึ่งเท่ากับ 256 เท่าหรือ 384 เท่าของความถี่ในการสุ่มตัวอย่าง
6. จีพีไอโอ
GPIO (General Purpose Input Output) หรือตัวขยายบัสโดยใช้อินเทอร์เฟซ I2C, SMBus หรือ SPI มาตรฐานอุตสาหกรรมเพื่อลดความซับซ้อนของการขยายพอร์ต I / O
เมื่อไมโครคอนโทรลเลอร์หรือชิปเซ็ตมีพอร์ต I / O ไม่เพียงพอหรือเมื่อระบบจำเป็นต้องใช้การสื่อสารหรือการควบคุมแบบอนุกรมระยะไกลผลิตภัณฑ์ GPIO สามารถให้ฟังก์ชันการควบคุมและการตรวจสอบเพิ่มเติมได้ พอร์ต GPIO แต่ละพอร์ตสามารถกำหนดค่าเป็นอินพุตหรือเอาต์พุตโดยซอฟต์แวร์ กลุ่มผลิตภัณฑ์ GPIO ของ Maxim ประกอบด้วย GPIO 8 พอร์ตถึง 28 พอร์ตซึ่งให้เอาต์พุตแบบกดดึงหรือเอาต์พุตแบบเปิด มีจำหน่ายในแพ็คเกจ QFN ขนาดเล็ก 3 มม. x 3 มม.
(1) ข้อดีของ GPIO (ตัวขยายพอร์ต):
①การใช้พลังงานต่ำ: GPIO มีการใช้พลังงานต่ำกว่า (ประมาณ1μAในขณะที่กระแสไฟฟ้าทำงานของμCคือ100μA)
②อินเทอร์เฟซ IIC Slave ในตัว: อินเทอร์เฟซ Slave IIC ในตัวของ GPIO สามารถทำงานได้เต็มความเร็วแม้ในโหมดสแตนด์บาย
③แพ็คเกจขนาดเล็ก: อุปกรณ์ GPIO มีขนาดแพ็คเกจที่เล็กที่สุด -3mm x 3mm QFN!
④ต้นทุนต่ำ: คุณไม่ต้องจ่ายเงินสำหรับฟังก์ชั่นที่ไม่ได้ใช้!
⑤รายชื่อด่วน: ไม่จำเป็นต้องเขียนรหัสเอกสารเพิ่มเติมและไม่ต้องบำรุงรักษา!
การควบคุมแสงที่ยืดหยุ่น: เอาต์พุต PWM ความละเอียดสูงในตัวหลายตัว
⑥เวลาตอบสนองที่คาดเดาได้: ย่อหรือกำหนดเวลาตอบสนองระหว่างเหตุการณ์ภายนอกและการขัดจังหวะ
⑦เอฟเฟกต์แสงที่ดีขึ้น: จับคู่เอาต์พุตปัจจุบันเพื่อให้แน่ใจว่าจอแสดงผลมีความสว่างสม่ำเสมอ
⑧การเดินสายแบบธรรมดา: ต้องใช้บัส IIC 2 คันหรือบัส SPI 3 คันเท่านั้น
7. เอสดิโอ
SDIO คืออินเทอร์เฟซการขยายประเภท SD นอกเหนือจากความสามารถในการเชื่อมต่อกับการ์ด SD แล้วยังสามารถเชื่อมต่อกับอุปกรณ์ที่รองรับอินเทอร์เฟซ SDIO จุดประสงค์ของซ็อกเก็ตไม่เพียง แต่ใส่การ์ดหน่วยความจำเท่านั้น PDA และแล็ปท็อปที่รองรับอินเทอร์เฟซ SDIO สามารถเชื่อมต่อกับเครื่องรับ GPS, อะแดปเตอร์ Wi-Fi หรือบลูทู ธ , โมเด็ม, อะแดปเตอร์ LAN, เครื่องอ่านบาร์โค้ด, วิทยุ FM, เครื่องรับโทรทัศน์, เครื่องอ่านการตรวจสอบความถูกต้องด้วยคลื่นความถี่วิทยุหรือกล้องดิจิทัลและอุปกรณ์อื่น ๆ ที่ใช้ SD อินเทอร์เฟซมาตรฐาน
โปรโตคอล SDIO ได้รับการพัฒนาและอัปเกรดจากโปรโตคอลของการ์ด SD สถานที่หลายแห่งยังคงใช้โปรโตคอลการอ่านและเขียนของการ์ด SD ในเวลาเดียวกันโปรโตคอล SDIO จะเพิ่มคำสั่ง CMD52 และ CMD53 ลงในโปรโตคอลการ์ด SD ด้วยเหตุนี้ความแตกต่างที่สำคัญระหว่างข้อกำหนดของ SDIO และการ์ด SD คือการเพิ่มมาตรฐานความเร็วต่ำ แอปพลิเคชันเป้าหมายของการ์ดความเร็วต่ำเริ่มต้นด้วยฮาร์ดแวร์ที่เล็กที่สุดเพื่อรองรับความสามารถ I / O ความเร็วต่ำ การ์ดความเร็วต่ำรองรับแอพพลิเคชั่นเช่นโมเด็มเครื่องสแกนบาร์โค้ดและเครื่องรับ GPS การ์ดความเร็วสูงรองรับการ์ดเครือข่ายการ์ดทีวีและการ์ด "คอมโบ" ฯลฯ การ์ดชุดนี้หมายถึงหน่วยความจำ + SDIO
ความแตกต่างที่สำคัญอีกประการระหว่าง SDIO และ SD card SPEC คือการเพิ่มมาตรฐานความเร็วต่ำ การ์ด SDIO ต้องการโหมดการส่ง SPI และ 1-bit SD เท่านั้น แอปพลิเคชันเป้าหมายของการ์ดความเร็วต่ำคือเพื่อรองรับความสามารถ I / O ความเร็วต่ำโดยมีค่าใช้จ่ายด้านฮาร์ดแวร์น้อยที่สุด การ์ดความเร็วต่ำรองรับแอพพลิเคชั่นเช่น MODEM เครื่องสแกนบาร์และเครื่องรับ GPS สำหรับการ์ดรวมความเร็วเต็มและการใช้งาน 4BIT เป็นข้อกำหนดบังคับสำหรับหน่วยความจำภายในและส่วน SDIO ของการ์ด ในอุปกรณ์ SDIO ที่ไม่รวมกันความเร็วสูงสุดจะต้องสูงถึง 25M เท่านั้นและความเร็วสูงสุดของการ์ดรวมจะเท่ากับความเร็วสูงสุดของการ์ด SD ซึ่งสูงกว่า 25M
8. สามารถ
CAN ชื่อเต็มคือ "Controller Area Network" นั่นคือ Controller Area Network ซึ่งเป็นหนึ่งในรถบัสภาคสนามที่ใช้กันอย่างแพร่หลายในโลก ในขั้นต้น CAN ได้รับการออกแบบให้เป็นการสื่อสารด้วยไมโครคอนโทรลเลอร์ในสภาพแวดล้อมของยานยนต์โดยแลกเปลี่ยนข้อมูลระหว่าง ECU อุปกรณ์ควบคุมอิเล็กทรอนิกส์ต่างๆในรถยนต์สร้างเครือข่ายควบคุมอิเล็กทรอนิกส์ของยานยนต์ ตัวอย่างเช่นอุปกรณ์ควบคุม CAN ฝังอยู่ในระบบการจัดการเครื่องยนต์ตัวควบคุมระบบส่งกำลังอุปกรณ์เครื่องมือวัดและระบบกระดูกสันหลังอิเล็กทรอนิกส์
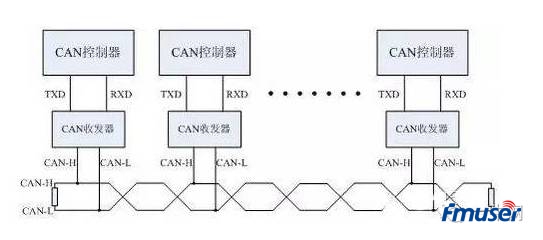
ในเครือข่ายเดียวที่ประกอบด้วย CAN บัสตามทฤษฎีแล้วสามารถเชื่อมต่อโหนดจำนวนนับไม่ถ้วนได้ ในการใช้งานจริงจำนวนโหนดจะถูก จำกัด โดยคุณสมบัติทางไฟฟ้าของฮาร์ดแวร์เครือข่าย ตัวอย่างเช่นเมื่อใช้ Philips P82C250 เป็นตัวรับส่งสัญญาณ CAN อนุญาตให้เชื่อมต่อโหนด 110 โหนดในเครือข่ายเดียวกัน สามารถให้อัตราการส่งข้อมูลสูงสุด 1Mbit / s ซึ่งทำให้การควบคุมแบบเรียลไทม์ทำได้ง่ายมาก นอกจากนี้คุณสมบัติการตรวจสอบข้อผิดพลาดของฮาร์ดแวร์ยังช่วยเพิ่มความสามารถของ CAN ในการต้านทานสัญญาณรบกวนแม่เหล็กไฟฟ้า
คุณสมบัติของบัส CAN:
1) สามารถทำงานในโหมดมัลติมาสเตอร์ โหนดใด ๆ บนเครือข่ายสามารถส่งข้อมูลไปยังโหนดอื่น ๆ บนเครือข่ายได้ตลอดเวลาโดยไม่คำนึงถึงมาสเตอร์และทาสและโหมดการสื่อสารมีความยืดหยุ่น
2) โหนดบนเครือข่ายสามารถแบ่งออกเป็นลำดับความสำคัญที่แตกต่างกันเพื่อให้เป็นไปตามข้อกำหนดแบบเรียลไทม์ที่แตกต่างกัน
3) ใช้กลไกโครงสร้างบัสอนุญาโตตุลาการแบบไม่ทำลาย เมื่อโหนดสองโหนดส่งข้อมูลไปยังเครือข่ายในเวลาเดียวกันโหนดที่มีลำดับความสำคัญต่ำกว่าจะหยุดการส่งข้อมูลในขณะที่โหนดที่มีลำดับความสำคัญสูงกว่าสามารถส่งข้อมูลต่อไปได้โดยไม่ได้รับผลกระทบ
4) ข้อมูลสามารถรับได้ในโหมดการส่งข้อมูลหลายแบบ: แบบจุดต่อจุดจุดต่อจุดหลายจุดและการออกอากาศทั่วโลก
5) ระยะการสื่อสารโดยตรงสูงสุดสามารถเข้าถึง 10 กม. (ความเร็วต่ำกว่า 4Kbps)
6) อัตราการสื่อสารสามารถเข้าถึงได้ถึง 1MB / s (ระยะทางที่ไกลที่สุดคือ 40m ในขณะนี้)



|
|
|
|
ไกลเท่าไหร่ (ยาว) ฝาครอบเครื่องส่งสัญญาณหรือไม่
ช่วงส่งขึ้นอยู่กับปัจจัยหลายอย่าง ระยะทางจริงจะขึ้นอยู่กับการติดตั้งเสาอากาศสูงที่ได้รับเสาอากาศโดยใช้สภาพแวดล้อมเช่นอาคารและสิ่งกีดขวางอื่น ๆ , ความไวของตัวรับสัญญาณ, เสาอากาศของเครื่องรับ การติดตั้งเสาอากาศสูงมากขึ้นและใช้ในชนบทระยะทางจะไกลมากขึ้น
ตัวอย่าง 5W FM Transmitter ใช้ในเมืองและบ้านเกิด:
ฉันมีการใช้งานของลูกค้า 5W ส่งสัญญาณ FM ประเทศสหรัฐอเมริกาที่มีเสาอากาศ GP ในบ้านเกิดของเขาและเขาทดสอบกับรถมันครอบคลุม 10km (6.21mile)
ผมทดสอบการส่งสัญญาณ FM 5W กับเสาอากาศ GP ในบ้านเกิดของฉันมันครอบคลุมเกี่ยวกับ 2km (1.24mile)
ผมทดสอบการส่งสัญญาณ FM 5W กับเสาอากาศ GP ในเมืองกวางโจวมันครอบคลุมเกี่ยวกับเพียง 300meter (984ft)
ด้านล่างนี้เป็นช่วงโดยประมาณของเครื่องส่งสัญญาณ FM อำนาจที่แตกต่างกัน (ช่วงมีเส้นผ่าศูนย์กลาง)
0.1W ~ 5W FM Transmitter: 100M ~ 1KM
5W ~ 15W FM Ttransmitter: 1KM ~ 3KM
15W ~ 80W FM Transmitter: 3KM ~ 10KM
80W ~ 500W FM Transmitter: 10KM ~ 30KM
500W ~ 1000W FM Transmitter: 30KM ~ 50KM
1KW ~ 2KW FM Transmitter: 50KM ~ 100KM
2KW ~ 5KW FM Transmitter: 100KM ~ 150KM
5KW ~ 10KW FM Transmitter: 150KM ~ 200KM
วิธีการติดต่อเราเพื่อส่งสัญญาณหรือไม่
โทรหาฉัน + 8618078869184 หรือ
ส่งอีเมลถึงฉัน [ป้องกันอีเมล]
1.How ไกลคุณต้องการที่จะครอบคลุมในเส้นผ่าศูนย์กลาง?
2.How สูงของหอคุณ?
3.Where คุณมาจาก?
และเราจะให้คำแนะนำมืออาชีพมากขึ้น
เกี่ยวกับเรา
FMUSER.ORG เป็น บริษัท บูรณาการระบบที่เน้นการส่งสัญญาณไร้สาย RF / อุปกรณ์สตูดิโอวิดีโอเสียง / สตรีมมิ่งและการประมวลผลข้อมูลเราให้บริการทุกอย่างตั้งแต่คำแนะนำและคำปรึกษาผ่านการรวมเข้ากับแร็คจนถึงการติดตั้ง
เรานำเสนอเครื่องส่งสัญญาณ FM, เครื่องส่งสัญญาณโทรทัศน์อะนาล็อก, เครื่องส่งสัญญาณโทรทัศน์ดิจิตอล, เครื่องส่งสัญญาณ VHF UHF, เสาอากาศ, ช่องเสียบสายโคแอกเชียล, STL, การประมวลผลทางอากาศ, ผลิตภัณฑ์ออกอากาศสำหรับสตูดิโอ, การตรวจสอบสัญญาณ ผลิตภัณฑ์ IPTV, Video / Audio Encoder / Decoder ออกแบบมาเพื่อตอบสนองความต้องการของทั้งเครือข่ายออกอากาศระหว่างประเทศขนาดใหญ่และสถานีส่วนตัวขนาดเล็กเหมือนกัน
โซลูชันของเรามีสถานีวิทยุ FM / สถานีโทรทัศน์อะนาล็อก / สถานีโทรทัศน์ดิจิตอล / อุปกรณ์สตูดิโอวิดีโอเสียง / ลิงค์เครื่องส่งสัญญาณสตูดิโอ / ระบบส่งสัญญาณโทรมาตร / ระบบโทรทัศน์ของโรงแรม / การแพร่ภาพสด IPTV / สตรีมมิงถ่ายทอดสด / การประชุมทางวิดีโอ / ระบบกระจายเสียง CATV
เราใช้ผลิตภัณฑ์เทคโนโลยีขั้นสูงสำหรับทุกระบบเพราะเรารู้ว่าความน่าเชื่อถือสูงและประสิทธิภาพสูงเป็นสิ่งสำคัญสำหรับระบบและโซลูชั่น ในเวลาเดียวกันเรายังต้องให้แน่ใจว่าระบบผลิตภัณฑ์ของเราในราคาที่สมเหตุสมผล
เรามีลูกค้าของผู้แพร่ภาพกระจายเสียงภาครัฐและเชิงพาณิชย์ผู้ประกอบการด้านการสื่อสารและหน่วยงานกำกับดูแลและเรายังนำเสนอโซลูชั่นและผลิตภัณฑ์ให้กับผู้กระจายสัญญาณขนาดเล็กท้องถิ่นและชุมชนหลายร้อยราย
FMUSER.ORG ส่งออกมานานกว่า 15 ปีและมีลูกค้าทั่วโลก ด้วยประสบการณ์ 13 ปีในด้านนี้เรามีทีมงานมืออาชีพเพื่อแก้ปัญหาทุกประเภทของลูกค้า เราทุ่มเทในการจัดหาผลิตภัณฑ์และบริการระดับมืออาชีพในราคาที่สมเหตุสมผล อีเมลติดต่อ: [ป้องกันอีเมล]
โรงงานของเรา

เรามี สร้างสรรค์สิ่งใหม่ ๆ ของโรงงาน คุณจะยินดีที่จะเข้าเยี่ยมชมโรงงานของเราเมื่อคุณมาถึงประเทศจีน

ในปัจจุบันมีอยู่แล้ว ลูกค้า 1095 ทั่วโลกเข้าเยี่ยมชมสำนักงานกวางเจาของเรา ถ้าคุณมาถึงประเทศจีนคุณจะยินดีที่จะมาเยี่ยมชม
ในงาน

นี่คือการมีส่วนร่วมของเราในแหล่งที่มาทั่วโลก 2012 ฮ่องกง Electronics Fair . ลูกค้าจากทั่วทุกมุมโลก ในที่สุดก็มีโอกาสที่จะได้พบปะกัน
Fmuser อยู่ที่ไหน

คุณสามารถค้นหาหมายเลขนี้ " 23.127460034623816,113.33224654197693 "ใน google map จากนั้นคุณจะพบสำนักงาน fmuser ของเรา
สำนักงาน FMUSER กว่างโจวอยู่ใน Tianhe District ซึ่งเป็น ศูนย์กลางของแคนตัน . มาก ใกล้ ไป แคนตันแฟร์ , กว่างโจวสถานีรถไฟ, ถนน xiaobei และ dashatou จะต้อง 10 นาที ถ้าใช้เวลา TAXI . ยินดีต้อนรับเพื่อน ๆ ทั่วโลกเพื่อเยี่ยมชมและเจรจาต่อรอง
ติดต่อ: บลูสกาย
โทรศัพท์มือถือ: + 8618078869184
WhatsApp: + 8618078869184
Wechat: + 8618078869184
E-mail: [ป้องกันอีเมล]
QQ: 727926717
skype: sky198710021
ที่อยู่: No.305 ห้อง Huilan อาคาร No.273 Huanpu ถนนกว่างโจวประเทศจีนไปรษณีย์: 510620
|
|
|
|
ภาษาอังกฤษ: เรายอมรับการชำระเงินทั้งหมดเช่น PayPal, Credit Card, Western Union, Alipay, Money Bookers, T / T, LC, DP, DA, OA, Payoneer หากคุณมีคำถามใด ๆ โปรดติดต่อฉัน [ป้องกันอีเมล] หรือ WhatsApp + 8618078869184
-
PayPal  www.paypal.com www.paypal.com
เราขอแนะนำให้คุณใช้ PayPal เพื่อซื้อสินค้าของเราที่ PayPal เป็นวิธีการที่ปลอดภัยที่จะซื้อบนอินเทอร์เน็ต
ทุกด้านล่างของหน้าในรายการของเราด้านบนมีโลโก้ PayPal จะจ่าย
บัตรเครดิต.หากคุณไม่ได้มี PayPal แต่คุณมีบัตรเครดิตคุณยังสามารถคลิกที่ปุ่มสีเหลือง PayPal ชำระเงินด้วยบัตรเครดิตของคุณ
-------------------------------------------------- -------------------
แต่ถ้าคุณยังไม่ได้บัตรเครดิตและไม่ได้มีบัญชี PayPal หรือยากที่จะมี Accout PayPal คุณสามารถใช้ต่อไปนี้:
เวสเทิร์นยูเนี่ย  www.westernunion.com www.westernunion.com
ชำระเงินผ่าน Western Union กับฉัน:
ชื่อ / ชื่อจริง: Yingfeng
นามสกุล / นามสกุล / นามสกุล: จาง
ชื่อเต็ม: Yingfeng Zhang
ประเทศ: China
เมืองกว่างโจว
|
-------------------------------------------------- -------------------
T / T ชำระเงินด้วย T / T (โอน / โอน / โอนเงินผ่านธนาคาร)
ข้อมูลธนาคารแรก (บัญชีบริษัท):
SWIFT BIC: BKCHHKHHXXX
ชื่อธนาคาร: ธนาคารแห่งประเทศจีน (ฮ่องกง) จำกัด ฮ่องกง
ที่อยู่ธนาคาร: BANK OF CHINA TOWER, 1 GARDEN ROAD, CENTRAL, HONG KONG
รหัสธนาคาร: 012
ชื่อบัญชี: FMUSER INTERNATIONAL GROUP LIMITED
เลขที่บัญชี : 012-676-2-007855-0
-------------------------------------------------- -------------------
ข้อมูลธนาคารที่สอง (บัญชีบริษัท):
ผู้รับผลประโยชน์: Fmuser International Group Inc
หมายเลขบัญชี: 44050158090900000337
ธนาคารผู้รับผลประโยชน์: China Construction Bank สาขากวางตุ้ง
SWIFT Code: PCBCCNBJGDX
ที่อยู่: NO.553 Tianhe Road, Guangzhou, Guangdong, Tianhe District, China
**หมายเหตุ: เมื่อคุณโอนเงินเข้าบัญชีธนาคารของเรา โปรดอย่าเขียนอะไรในช่องหมายเหตุ มิฉะนั้น เราจะไม่สามารถรับการชำระเงินได้เนื่องจากนโยบายของรัฐบาลเกี่ยวกับธุรกิจการค้าระหว่างประเทศ
|
|
|
|
* มันจะถูกส่งไปใน 1 2-วันทำการเมื่อชำระเงินที่ชัดเจน
* เราจะส่งไปยังที่อยู่ของ PayPal หากคุณต้องการเปลี่ยนที่อยู่กรุณาส่งที่อยู่ที่ถูกต้องและหมายเลขโทรศัพท์อีเมลของฉัน [ป้องกันอีเมล]
* ถ้าแพคเกจที่อยู่ด้านล่าง 2kg เราจะถูกส่งผ่านทางไปรษณีย์ทางอากาศก็จะใช้เวลาประมาณ 15-25days ถึงมือของท่าน
ถ้าแพคเกจเป็นมากกว่า 2kg เราจะจัดส่งทาง EMS, DHL, UPS, Fedex ส่งด่วนรวดเร็วก็จะใช้เวลาประมาณ 7 ~ 15days ถึงมือของท่าน
ถ้าแพคเกจมากกว่า 100kg เราจะส่งผ่าน DHL หรือขนส่งสินค้าทางอากาศ จะใช้เวลาประมาณ 3 ~ 7days ถึงมือของท่าน
แพคเกจทั้งหมดที่มีรูปแบบจีนกวางโจว
* แพคเกจจะถูกส่งเป็น "ของขวัญ" และแจ้งให้ทราบน้อยที่สุดเท่าที่จะเป็นไปได้ผู้ซื้อไม่จำเป็นต้องจ่าย "ภาษี"
* หลังจากเรือเราจะส่ง E-mail และให้คุณติดตามตัวเลข
|
|
|
สำหรับการรับประกัน
ติดต่อเรา --- >> ส่งคืนสินค้าให้เรา --- >> รับและส่งเปลี่ยนใหม่
ชื่อ: หลิว Xiaoxia
ที่อยู่: 305Fang HuiLanGe HuangPuDaDaoXi 273Hao TianHeQu กว่างโจวประเทศจีน
ไปรษณีย์: 510620
โทรศัพท์: + 8618078869184
โปรดกลับไปอยู่นี้และเขียนที่อยู่ของ PayPal ชื่อปัญหาของคุณบนหมายเหตุ: |
|